



वेअरहाऊसमध्ये विविध प्रकारचे स्टोरेज शेल्फ् 'चे अव रुप आहेत आणि स्टोरेज आणि पुनर्प्राप्ती पद्धती प्रामुख्याने खालील श्रेणींमध्ये विभागल्या आहेत, ज्यात मॅन्युअल स्टोरेज आणि पुनर्प्राप्ती, फोर्कलिफ्ट स्टोरेज आणि पुनर्प्राप्ती आणि स्वयंचलित स्टोरेज आणि पुनर्प्राप्ती समाविष्ट आहे. आजकाल, बऱ्याच उद्योगांना स्वयंचलित वेअरहाऊस ऑपरेशन लक्षात घ्यायचे आहे, म्हणून त्यांना स्वयंचलित गोदाम शेल्फ् 'चे अव रुप वापरायचे आहेत. उदाहरणार्थ, फोर-वे कार रॅक हा एक प्रकारचा स्वयंचलित स्टोरेज रॅक आहे. चार-मार्गी शटल AGV गोदामात कसे प्रवेश करते आणि बाहेर कसे जाते? वेअरहाऊस हेवी शेल्फ उत्पादन संयंत्र Haigris विश्लेषण.

चार मार्ग शटल गोदाम
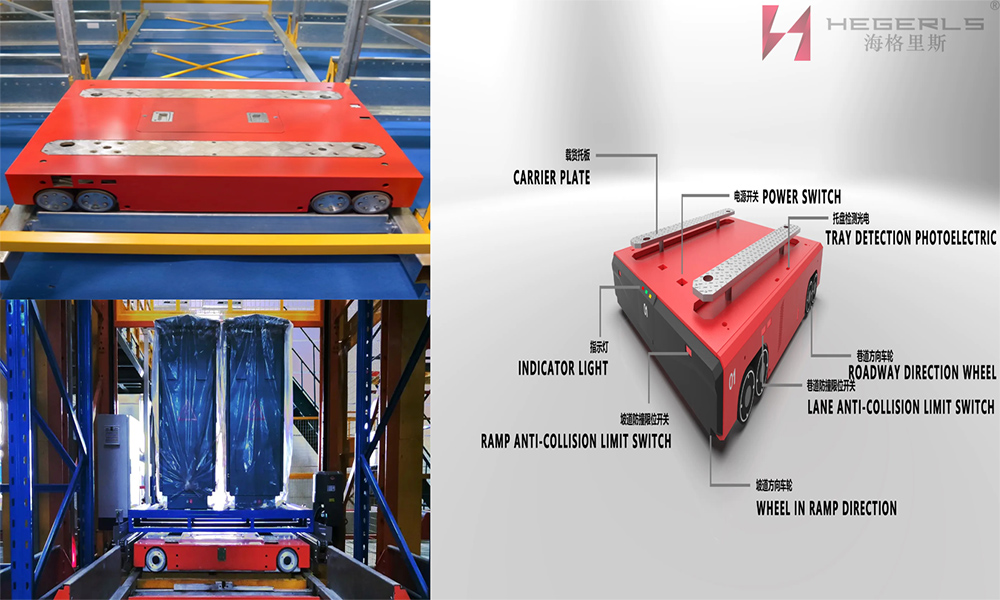
फोर-वे शटल कार 12 चाकांनी सुसज्ज आहे, जी ट्रॅक प्लेनसह चार दिशांनी प्रवास करू शकते आणि वेअरहाऊस प्लेनवरील कोणत्याही मालवाहू जागेवर मुक्तपणे पोहोचू शकते. चार-मार्गी शटल एकाच वेळी दोन्ही बाजूंच्या चाकांनी चालवले जाते हे सुनिश्चित करण्यासाठी की कारचे शरीर ऑपरेशन दरम्यान विचलित होणार नाही आणि ते त्रि-आयामी शेल्फवर अनुदैर्ध्य आणि ट्रान्सव्हर्स रेलच्या बाजूने चालू शकते.

त्याच वेळी, चार-मार्गी शटल हे एक बुद्धिमान हाताळणी उपकरण आहे जे केवळ रेखांशाच्या दिशेनेच चालत नाही तर बाजूने देखील चालते. चार-मार्गी शटलमध्ये उच्च लवचिकता असते, ते इच्छेनुसार कार्यरत रस्ता बदलू शकते आणि शटल कारची संख्या वाढवून किंवा कमी करून सिस्टमची क्षमता समायोजित करू शकते. आवश्यक असल्यास, कार्यरत वाहन संघाचे शेड्युलिंग मोड स्थापित करून, प्रवेश आणि निर्गमन ऑपरेशन्समधील अडथळे सोडवून सिस्टमच्या सर्वोच्च मूल्यास प्रतिसाद दिला जाऊ शकतो आणि एकमेकांना बदलले जाऊ शकते, जेव्हा शटल किंवा लिफ्ट अयशस्वी होते, इतर सिस्टम क्षमतेवर परिणाम न करता ऑपरेशन पूर्ण करणे सुरू ठेवण्यासाठी डिस्पॅचिंग सिस्टमद्वारे शटल किंवा लिफ्ट पाठवल्या जाऊ शकतात. हे उपकरण कमी प्रवाह आणि उच्च-घनता संचयन, तसेच उच्च प्रवाह आणि उच्च-घनता संचयन दोन्हीसाठी योग्य आहे. हे अधिक कार्यक्षमता, खर्च आणि संसाधने प्राप्त करू शकते.
चार-मार्गी शटल AGV गोदामात कसे प्रवेश करते आणि बाहेर कसे जाते?

1) गोदाम पद्धत
अ) बुद्धिमान चार-मार्गी शटलचे तंत्रज्ञ प्रथम बुद्धिमान चार-मार्गी शटल चालू करतात आणि ते तयार करतात. बुद्धिमान चार-मार्गी शटल स्टँडबायवर आहे;
b) इंटेलिजेंट फोर-वे शटलच्या पिकिंग लोकेशनची पुष्टी केल्यानंतर, WCS बुद्धिमान चार-मार्गी शटलच्या वर्तमान स्थान आणि गंतव्य स्थानानुसार ड्रायव्हिंग मार्गाची योजना करेल आणि नंतर कर्मचारी बुद्धिमान चार-मार्गांना वस्तू वितरित करतील. WCS द्वारे शटल;
c) बुद्धिमान चार-मार्गी शटल प्राप्त कार्य आदेशानुसार वितरण कार्य पार पाडण्यास प्रारंभ करते;
ड) क्रॉसिंग ट्रॅकवर, बुद्धिमान चार-मार्गी शटल वास्तविक अंतरावरून विस्थापन मोडमध्ये प्रवास करते. ड्रायव्हिंग प्रक्रियेदरम्यान, ते वाहनाच्या शरीराच्या खालच्या भागातून जाणारे ट्रॅक सतत स्कॅन करते. प्रत्येक क्रॉसिंग पोझिशन ते पार करते, ते ट्रॅक स्कॅन करून ते अंतर मोजते आणि कॅलिब्रेट करते. जेव्हा ते गंतव्यस्थानाच्या जवळ असते, तेव्हा ते पार्किंगच्या स्थितीचे अचूक स्थान प्राप्त करण्यासाठी बाजूकडील लेसर सेन्सरद्वारे पार्किंगची स्थिती सुरेख करते;
e) सब चॅनेलमध्ये, बुद्धिमान चार-मार्गी शटल क्रॉस ट्रॅक आणि साइड कॅलिब्रेशन मिरर रिफ्लेक्टर स्कॅन करू शकते, पॉइंट पोझिशन स्कॅन करून ड्रायव्हिंग अंतर तपासू शकते आणि गंतव्यस्थानावर पोहोचण्यासाठी सब चॅनेलमध्ये अचूक पोझिशनिंग नियंत्रण प्राप्त करू शकते;
f) इंटेलिजेंट फोर-वे शटल निवडलेल्या पिकिंग पोझिशनवर आल्यावर, पॅलेट खाली पडते, वस्तू शेल्फवर ठेवल्या जातात आणि WCS सिस्टमला डिलिव्हरी टास्क पूर्ण झाल्याबद्दल सूचित केले जाते;
g) बुद्धिमान चार-मार्गी शटल कार्य सूचना प्राप्त करत राहते किंवा स्टँडबाय क्षेत्राकडे परत येते.
2) वितरण पद्धत
अ) बुद्धिमान चार-मार्गी शटलचे तंत्रज्ञ प्रथम बुद्धिमान चार-मार्गी शटल चालू करतात आणि ते तयार करतात. बुद्धिमान चार-मार्गी शटल स्टँडबायवर आहे;
b) इंटेलिजेंट फोर-वे शटलच्या पिकिंग लोकेशनची पुष्टी केल्यानंतर, WCS बुद्धिमान फोर-वे शटलच्या सध्याच्या स्थान आणि गंतव्य स्थानानुसार ड्रायव्हिंग मार्गाची योजना करेल आणि नंतर कर्मचारी निवडण्याचे कार्य बुद्धिमान चारकडे पाठवेल. -WCS द्वारे मार्ग शटल;
c) बुद्धिमान चार-मार्गी शटल प्राप्त कार्य आदेशानुसार माल उचलण्यास सुरुवात करते;
ड) क्रॉसिंग ट्रॅकवर, बुद्धिमान चार-मार्गी शटल प्रत्यक्ष अंतरावरून विस्थापन मोडमध्ये प्रवास करते. ड्रायव्हिंग प्रक्रियेदरम्यान, ते वाहनाच्या शरीराच्या खालच्या भागातून जाणारे ट्रॅक सतत स्कॅन करते. प्रत्येक क्रॉसिंग पोझिशन ते पार करते, ते ट्रॅक स्कॅन करून ते किती अंतर पार करते ते तपासते आणि तपासते. गंतव्यस्थानाजवळ जाताना, अचूक पोझिशनिंग कंट्रोल आणि पार्किंग साध्य करण्यासाठी ते लॅटरल लेझर सेन्सरद्वारे पार्किंगची स्थिती सुरेख करते;
ई) सब चॅनेलमध्ये, बुद्धिमान चार-मार्गी शटल कार क्रॉस ट्रॅक आणि साइड कॅलिब्रेशन मिरर रिफ्लेक्टर स्कॅन करते, हे पॉइंट स्कॅन करून ड्रायव्हिंग अंतराचे परीक्षण करते आणि कॅलिब्रेट करते आणि गंतव्यस्थानावर पोहोचण्यासाठी सब चॅनेलमध्ये अचूक स्थितीचे नियंत्रण लक्षात येते. .
पोस्ट वेळ: सप्टेंबर-19-2022